
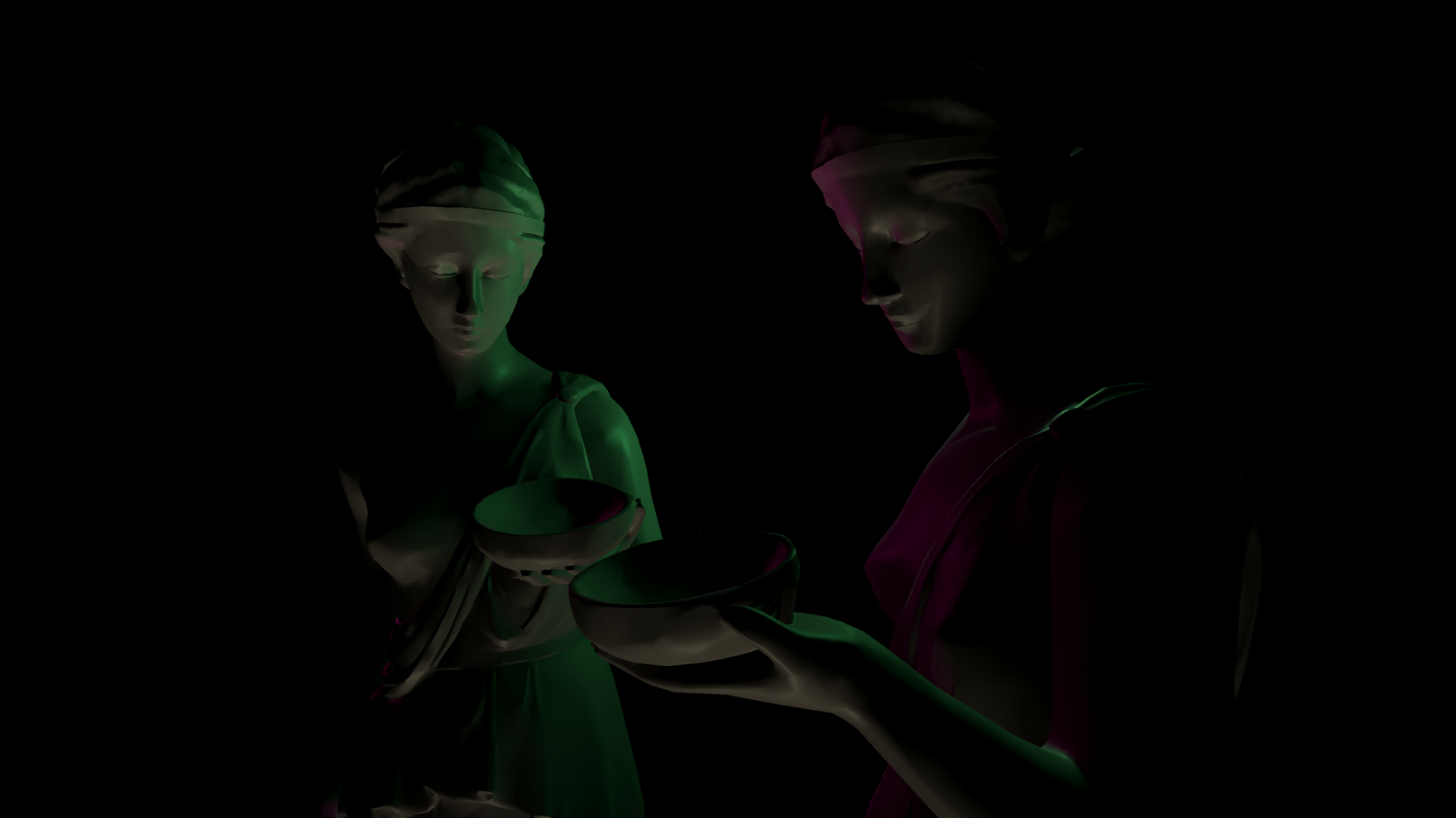
This is the second part of the tutorial on Fast Subsurface Scattering in Unity. This post will show a working implementation of this effect.

This is a two part series:
At the end of this post, you will find a link to download the Unity project.
There are 152 posts filed in Tutorial (this is page 8 of 16).
This is the second part of the tutorial on Fast Subsurface Scattering in Unity. This post will show a working implementation of this effect.
This is a two part series:
At the end of this post, you will find a link to download the Unity project.

Following the unexpected success of the tutorial on Inverse Kinematics for Tentacles, I have decided to share the shader that I used to make them so realistic.
If you are not familiar with shaders, fear not. This tutorial will be target at beginners, and you’ll only need a basic understanding of how Unity works.
A link to download the full Unity package for this tutorial is provided at the end.
This post continues our journey in the depth of Inverse Kinematics. In this tutorial you will learn how to apply this powerful technique to create realistic tentacles.
The other post in this series can be found here:
At the end of this post you can find a link to download all the assets and scenes necessary to replicate this tutorial.
After a long journey about the Mathematics of Forward Kinematics and the geometrical details of gradient descent, we are ready to finally show a working implementation for the problem of inverse kinematics. This tutorial will show how it can be applied to a robotic arm, like the one in the image below.
The other post in this series can be found here:
At the end of this post you can find a link to download all the assets and scenes necessary to replicate this tutorial. Continue reading
This post concludes the theoretical introduction to Inverse Kinematics, providing a programmatical solution based on gradient descent. This article does not aim to be a comprehensive guide on the topic, but a gentle introduction. The next post, Inverse Kinematics for Robotic Arms, will show an actual C# implementation of this algorithm in with Unity.
The other post in this series can be found here:DistanceFromTarget
At the end of this post you can find a link to download all the assets and scenes necessary to replicate this tutorial.

This tutorial continues our quest to solve the problem of forward kinematics. After exploring a mathematical solution in The Mathematics of Forward Kinematics, we will see how to translate it into C# for Unity. The next tutorial, An Introduction to Gradient Descent, will finally show the theoretical foundations to solve inverse kinematics.
The other post in this series can be found here:
At the end of this post you can find a link to download all the assets and scenes necessary to replicate this tutorial.
This tutorial starts our journey into the world of inverse kinematics. There are countless ways to approach this problem, but they all starts with forward kinematics.
Inverse kinematics takes a point in space, and tells you how to move your arm to reach it. Forward kinematics solves the opposite, dual problem. Knowing how you are moving your arm, it tells which point in space it reaches.
The other post in this series can be found here:
At the end of this post you can find a link to download all the assets and scenes necessary to replicate this tutorial.
This post shows how it is possible to find the position of an object in space, using a technique called trilateration. The traditional approach to this problem relies on three measurements only. This tutorial addresses how to it is possible to take into account more measurements to improve the precision of the final result. This algorithm is robust and can work even with inaccurate measurements.
If you are unfamiliar with the concepts of latitude and longitude, I suggest you read the first post in this series: Understanding Geographical Coordinates.
This series introduces the concept of trilateration. This technique can be applied to a wide range of problems, from indoor localisation to earthquake detection. This first post provides a general introduction to the concept of geographical coordinates, and how they can be effectively manipulated. The second post in the series, Positioning and Trilateration, will cover the actual techniques used to identify the position of an object given independent distance readings. Most trilateration tutorials require the measures from the sensors to be precise and consistent. The approach here presented, instead, is highly robust and can tolerate inaccurate readings.

This tutorial shows how to make the most out of coroutines in Unity.