
This post concludes the theoretical introduction to Inverse Kinematics, providing a programmatical solution based on gradient descent. This article does not aim to be a comprehensive guide on the topic, but a gentle introduction. The next post, Inverse Kinematics for Robotic Arms, will show an actual C# implementation of this algorithm in with Unity.
The other post in this series can be found here:DistanceFromTarget
- Part 1. An Introduction to Procedural Animations
- Part 2. The Mathematics of Forward Kinematics
- Part 3. Implementing Forward Kinematics
- Part 4. An Introduction to Gradient Descent
- Part 5. Inverse Kinematics for Robotic Arms
- Part 6. Inverse Kinematics for Tentacles
- Part 7. Inverse Kinematics for Spider Legs 🚧 (work in progress!)
At the end of this post you can find a link to download all the assets and scenes necessary to replicate this tutorial.
Introduction
The previous post in this series, Implementing Forward Kinematics, provided a solution to the problem of Forward Kinematics. We have left with a function, called ForwardKinematics, which indicates which point in space our robotic arm is currently touching.
If we have a specific point in space that we want to reach, we can use ForwardKinematics to estimate how close we are, given the current joint configuration. The distance from the target is a function that can be implemented like this:
public float DistanceFromTarget(Vector3 target, float [] angles)
{
Vector3 point = ForwardKinematics (angles);
return Vector3.Distance(point, target);
}
Finding a solution for the problem of Inverse Kinematics means that we want to minimise the value returned from DistanceFromTarget. Minimising a function is one of most common problems, both in programming and Mathematics. The approach we will use relies on a technique called gradient descent (Wikipedia). Despite not being the most efficient, it has the advantage of being problem-agnostic and requires knowledge that most programmers already have.
![\[P_{i} = P_{i-1} + rotate\left(D_i, P_{i-1}, \sum_{k=0}^{i-1}\alpha_k\right)\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-7aa6ae4e17c0600f1f9f53ff2e6b3a5a_l3.png "Rendered by QuickLaTeX.com")
The distance from a target point  is given by:
is given by:
![\[D = \left \| T - P_{effector}\right \|\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-7bbc1a97eb9ceefa79d467eb253b6bdb_l3.png "Rendered by QuickLaTeX.com")
where  is the Euclidean norm of a vector
is the Euclidean norm of a vector  .
.
An analytical solution to this problem can be found by minimising  , which is a function of
, which is a function of  .
.
There are other, more structured approaches to solve the problem of inverse kinematics. You can have a look at the Denavit-Hartenberg matrices (Wikipedia) to start.
Gradient Descent
The easiest way to understand how gradient descent works, is to imagine a hilly landscape. We find ourselves on a random location, and we want to reach its lowest point. We call that the minimum of the landscape. At each step, gradient descent tells you to move in the direction that lowers your altitude. If the geometry of the landscape is relatively simple, this approach will converge towards the bottom of the valley.
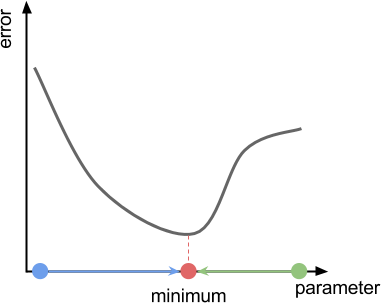
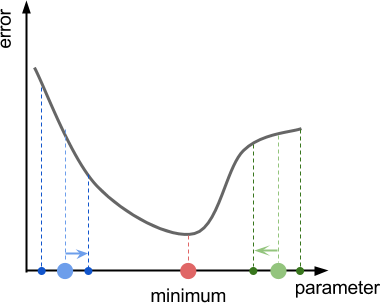
The diagram below shows a typical scenario in which gradient descent is successful. In this toy example, we have a function that takes a single parameter (X axis), and returns an error value (Y axis). Starting from random points on the X axis (blue and green points), gradient descent should force us to move in the direction of the minimum (blue and green arrows).
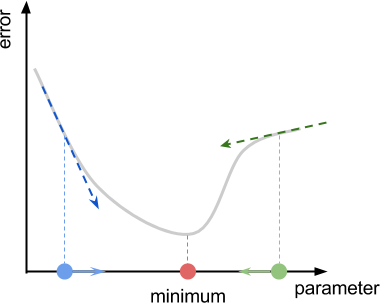
Looking at the function in its entirety, the direction in which we have to move is obvious. Unfortunately, gradient descent has no prior knowledge of where the minimum is. The best guess the algorithm can do is to move in the direction that of the slope, also called the gradient of the function. If you are on a hill, let a ball go and follow it to reach the valley. The diagram below shows the gradient of the error function at two different points.
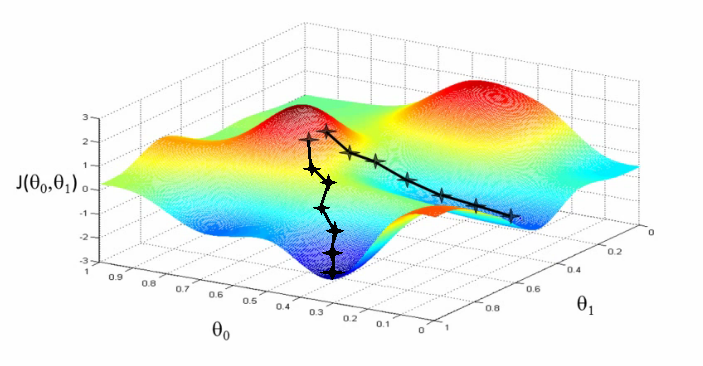
This is what the landscape for a robotic arm with two joints (controller by  and
and  might look like:
might look like:
Gradient Estimation
If you have studied Calculus before, you might know the gradient of a function is deeply connected to its derivative. Calculating the derivative, however, requires the function to satisfy certain mathematical properties that, in general, cannot be guaranteed for arbitrary problems. Moreover, the analytical derivation of the derivative needs the error function to be presented analytically. Once again, you do not always have access to an analytical version of the function you are trying to minimise.
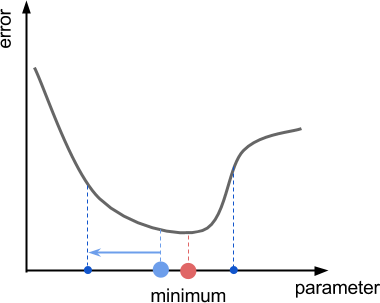
In all those cases, it is impossible to access the true derivative of the function. The solution is to give a rough estimate of its value. The diagram below shows how this can be done in one dimension. By sampling nearby points, you can get a feeling for the local gradient of the function. If the error function is smaller on the left, you go on the left. Likewise, if it is smaller on the right, you go on the right.
This sampling distance will be called  in the following section.
in the following section.
The gradient or directional derivative of a function is a vector that points in the direction of the steepest ascent. In the case of one dimensional functions (like the ones shown in these diagrams) the gradient is either  or
or  if the function is going up or down, respectively. If a function is defined over two variables (for instance, a robotic arm with two joints) then the gradient is an “arrow” (a unit vector) of two elements which points towards the steepest ascent.
if the function is going up or down, respectively. If a function is defined over two variables (for instance, a robotic arm with two joints) then the gradient is an “arrow” (a unit vector) of two elements which points towards the steepest ascent.
The derivative of a function, instead, is a single number that indicates how fast a function is rising when moving in the direction of its gradient.
In this tutorial, we do not aim to calculate the real gradient of the function. Instead, we provide an estimation. Out estimated gradient is a vector that, hopefully, indicates the direction or the steepest ascent. As we will see, it might not necessarily be of a unit vector.
❓ How critical is this sampling?
Think about the following:
The sampling distance used to estimate the gradient is too large. Gradient descent incorrectly believes the right side is higher than the left one. The result is that the algorithm proceeds in the wrong direction.
Reducing the sampling distance attenuates this problem, but it never gets rid of it. Moreover, a smaller sampling distance causes a a slower convergence to a solution.
This problem can be solved by adopting more advanced versions of gradient descents.
❓ What if the function has several local minima?
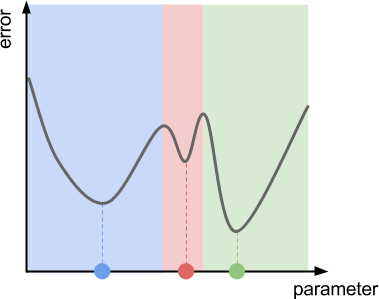
With the naive description of gradient descent that has been given so far, you could see this happening with the function in the diagram below. This function has three local minima, which represents three different valleys. If we initialise gradient descent using a point from the green region, we will end up at the bottom of the green valley. The same applies for the red and blue regions.
Once again, all of those problems are addressed by adopting more advanced versions of gradient descent.
The Maths
Now that we have a general understanding of how gradient descent works graphically, let’s see how this translates mathematically. The first step is to calculate the gradient of our error function  at a specific point
at a specific point  . What we need is to find the direction in which the function grows. The gradient of a function is deeply connected with its derivative. For this reason, a good starting point for our estimation is to investigate how the derivative is calculate in the first place.
. What we need is to find the direction in which the function grows. The gradient of a function is deeply connected with its derivative. For this reason, a good starting point for our estimation is to investigate how the derivative is calculate in the first place.
Mathematically speaking, the derivative of is called  . It’s value at the point is
. It’s value at the point is  , and it indicates how fast the function grows. It holds that:
, and it indicates how fast the function grows. It holds that:
 is going up, locally;
is going up, locally; is going down, locally;
is going down, locally; is flat, locally.
is flat, locally.
The idea is to use an estimation of to calculate the gradient, called  . Mathematically, is defined as:
. Mathematically, is defined as:
![\[{f}'\left(p\right) \right ) = \lim_{\Delta x \rightarrow 0} \frac{f\left(p+\Delta x\right) - f\left(p\right)}{\Delta x}\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-e3b6d9c52dd0a28f06a481e0ca770ecd_l3.png "Rendered by QuickLaTeX.com")
The following diagram shows what this means:
 For what we are concerned, to estimate the derivative we need to sample the error function at two different points. The small distance between them, is the sampling distance that we have introduced in the previous section.
For what we are concerned, to estimate the derivative we need to sample the error function at two different points. The small distance between them, is the sampling distance that we have introduced in the previous section.
To recap. The actual derivative of a function requires the usage of a limit. Our gradient is an estimation of the derivative, made using a sufficiently small sampling distance:
- Derivative
- Estimated gradient
![\[\nabla{f}\left(p\right) \right ) = \frac{f\left(p+\Delta x\right) - f\left(p\right)}{\Delta x}\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-3e79ff44f4778d2284eeb96651712f4d_l3.png "Rendered by QuickLaTeX.com")
We will see in the next section how these two differ for functions with multiple variables.
Once we have found our estimated derivative, we need to move in its opposite direction to climb down the function. This means that we have to update our parameter like this:
![\[p_{i+1} = p_{i} - L \nabla {f}\left(p_i\right)\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-4e671f2ddfcd5b5f561ea33e300d7e7b_l3.png "Rendered by QuickLaTeX.com")
The constant  is often referred as learning rate, and it dictates how fast we move against the gradient. Larger values approach the solution faster, but are also more likely to overshoot it.
is often referred as learning rate, and it dictates how fast we move against the gradient. Larger values approach the solution faster, but are also more likely to overshoot it.
Think about our toy example. The smallest the sampling distance  is, the better we can estimate the actual gradient of the function. However, we can’t really set
is, the better we can estimate the actual gradient of the function. However, we can’t really set  , because divisions by zero are not allowed. Limits allow us to circumnavigate this issue. We cannot divide by zero, but with limits we can ask for a number that is arbitrarily close to zero, without ever being actually zero.
, because divisions by zero are not allowed. Limits allow us to circumnavigate this issue. We cannot divide by zero, but with limits we can ask for a number that is arbitrarily close to zero, without ever being actually zero.
Multiple Variables
The solution we have found so far works on a single dimension. What it means is that we have given the definition of the derivative for a function of the type  , where is a single number. In this particular case, we could find a reasonably accurate estimate of the derivative by sampling the function at two points: and
, where is a single number. In this particular case, we could find a reasonably accurate estimate of the derivative by sampling the function at two points: and  . The result is a single number that indicates if the function is increasing or decreasing. We have used this number as our gradient.
. The result is a single number that indicates if the function is increasing or decreasing. We have used this number as our gradient.
A function with a single parameter corresponds to robot arm with a single joint. If we want to perform gradient descent for more complex robotic arms, we need to define the gradient for functions on multiple variables. If our robotic arm has three joints, for instance, our function will look more like  . In such a case, the gradient is a vector made out of three numbers, which indicate the local behaviour of in the 3D dimensional space of its parameters.
. In such a case, the gradient is a vector made out of three numbers, which indicate the local behaviour of in the 3D dimensional space of its parameters.
We can introduce the concept of partial derivatives, which essentially are “traditional” derivatives, calculated on a single variable at a time:
![\[{f}'_{\alpha_0}\left(\alpha_0, \alpha_1, \alpha_2\right) \right )=\lim_{\Delta x \rightarrow 0} \frac{f\left(\alpha_0 + \Delta_x, \alpha_1, \alpha_2\right)-f\left(\alpha_0, \alpha_1, \alpha_2\right)}{\Delta x}\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-e95b8a4b5582f2bb8469608423c1e5cb_l3.png "Rendered by QuickLaTeX.com")
![\[{f}'_{\alpha_1}\left(\alpha_0, \alpha_1, \alpha_2\right) \right )=\lim_{\Delta y \rightarrow 0} \frac{f\left(\alpha_0, \alpha_1+\Delta_y, \alpha_2\right)-f\left(\alpha_0, \alpha_1, \alpha_2\right)}{\Delta y}\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-425c67fea0833b03934dd69bf95cbd61_l3.png "Rendered by QuickLaTeX.com")
![\[{f}'_{\alpha_2}\left(\alpha_0, \alpha_1, \alpha_2\right) \right )=\lim_{\Delta z \rightarrow 0} \frac{f\left(\alpha_0, \alpha_1, \alpha_2+\Delta_z\right)-f\left(\alpha_0, \alpha_1, \alpha_2\right)}{\Delta z}\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-5481078734133a5ee42c7a6609931bca_l3.png "Rendered by QuickLaTeX.com")
They represent three different scalar numbers, each indicating how the function grows on a specific direction (or axes). To calculate our total gradient, we approximate each partial derivative with a correspondent gradient, using sufficiently small sampling distances ,  and
and  :
:
![\[\nabla {f}_{\alpha_0}\left(\alpha_0, \alpha_1, \alpha_2\right) \right )=\frac{f\left(\alpha_0 + \Delta_x, \alpha_1, \alpha_2\right)-f\left(\alpha_0, \alpha_1, \alpha_2\right)}{\Delta x}\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-4626e93b73f6506ffc2dacc563cc508b_l3.png "Rendered by QuickLaTeX.com")
![\[\nabla {f}_{\alpha_1}\left(\alpha_0, \alpha_1, \alpha_2\right) \right )=\frac{f\left(\alpha_0, \alpha_1+\Delta_y, \alpha_2\right)-f\left(\alpha_0, \alpha_1, \alpha_2\right)}{\Delta y}\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-775b18ab9c3ecee9216ee4eb75113387_l3.png "Rendered by QuickLaTeX.com")
![\[\nabla {f}_{\alpha_2}\left(\alpha_0, \alpha_1, \alpha_2\right) \right )= \frac{f\left(\alpha_0, \alpha_1, \alpha_2+\Delta_z\right)-f\left(\alpha_0, \alpha_1, \alpha_2\right)}{\Delta z}\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-b86e067592a813fa0df382d57ca29b6d_l3.png "Rendered by QuickLaTeX.com")
For our gradient descent, we will use the vector that incorporates those three results as the gradient:
![\[\nabla f \left(\alpha_0, \alpha_1, \alpha_2\right) = \left[\nabla {f}_{\alpha_0}\left(\alpha_0, \alpha_1, \alpha_2\right),\nabla{f}_{\alpha_1}\left(\alpha_0, \alpha_1, \alpha_2\right) ,\nabla{f}_{\alpha_2}\left(\alpha_0, \alpha_1, \alpha_2\right)\right]\]](https://www.alanzucconi.com/wp-content/ql-cache/quicklatex.com-59f3a5003dd0bde7b78ac4406e5d22d5_l3.png "Rendered by QuickLaTeX.com")
While this might sounds like a mathematical abuse (and it probably is!) it is not necessarily a problem for our algorithm. What we need is a vector that points in the direction of the steepest ascent. Using an estimation of the partial derivatives as elements of such a vector satisfy our constraints. If we want this to be a unit vector, we can simply normalise it, by dividing it by its length.
Using a unit vector as the advantage that we know the maximum speed at which we move along the surface, which is the learning rate . Using a non normalised gradient means that we more faster or slower depending on the inclination of . This is neither good nor bad; it’s just a different approach to solve this problem.
Other resources
The next part of this tutorial will finally show a working implementation of this algorithm.
- Part 1. An Introduction to Procedural Animations
- Part 2. The Mathematics of Forward Kinematics
- Part 3. Implementing Forward Kinematics
- Part 4. An Introduction to Gradient Descent
- Part 5. Inverse Kinematics for Robotic Arms
- Part 6. Inverse Kinematics for Tentacles
- Part 7. Inverse Kinematics for Spider Legs 🚧 (work in progress!)
Become a Patron!
Patreon You can download the Unity project for this tutorial on Patreon.
Credits for the 3D model of the robotic arm goes to Petr P.
💖 Support this blog
This website exists thanks to the contribution of patrons on Patreon. If you think these posts have either helped or inspired you, please consider supporting this blog.
📧 Stay updated
You will be notified when a new tutorial is released!
📝 Licensing
You are free to use, adapt and build upon this tutorial for your own projects (even commercially) as long as you credit me.
You are not allowed to redistribute the content of this tutorial on other platforms, especially the parts that are only available on Patreon.
If the knowledge you have gained had a significant impact on your project, a mention in the credit would be very appreciated. ❤️🧔🏻
This is a lot to take in, had I not already completed higher level math courses at my university this would certainly be a much tougher read than it already is. You explained very thoroughly however, you must have a deep understanding of the topic. I appreciate the tutorial and am eager to learn more.
Thank you!
I wanted to give a more Maths-y introduction to the topic. Gradient Descent is often implemented in a very naive way. But it has solid theoretical foundations.
Very interesting and useful, thanks. I think you need ∇fα₂ once in your final vector though, rather than ∇fα₀ twice.
Thank you! 🙂
There is a little mistake in the code?
As DistanceFromTarget returns float, not Vector3. Might confuse someone with very little experience in C#
Thank you!
Hi, thank you for this explanation.
It is not really a big deal, but I think there are two missing “=” in the first formulas of the derivatives, before the limit.
Thanks again
Thank you for spotting that, Bob!
I have corrected the formulas!